无刷电机有感控制和无感控制的区别
发布日期:2024-06-07
点击次数:68
BLDC进行梯形波控制时,需要检测转子磁极位置,根据检测的位置定子线圈进行换相通电,形成6步的旋转磁场,进而带动转子同步转动的控制方式。而检测转子磁极位置又可分为电机带霍尔传感器(有感)以及不带霍尔传感器方法,检测转子磁极位置的方法不同,会直接BLDC控制模式不同。
BLDC有感控制
对于BLDC有感控制,要求BLDC电机本身装有霍尔传感器,电机霍尔传感器安装时需要相差120°,如下图所示。
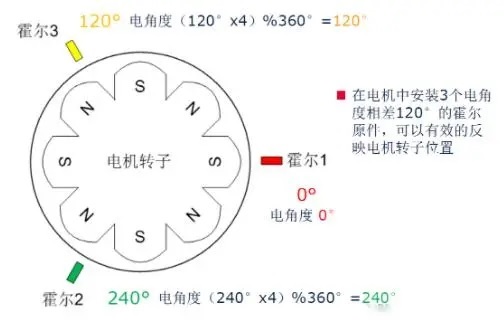
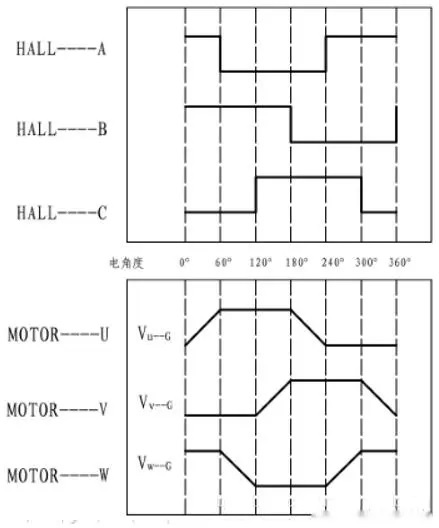
电机按一定方向转动时,3个霍尔的输出会按照6步的规律变化如下:
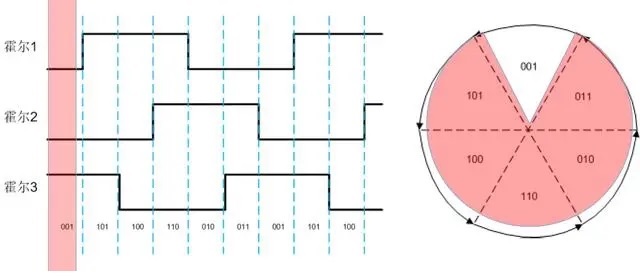
根据霍尔传感器位置,进而按照一定规律给三相绕组通电,从而来实现电机的控制。考虑到每个电机霍尔传感器安装方式不同,换相开关表会有一定的区别。具体可以根据厂商提供的资料或实测电机霍尔输出来确定关系。
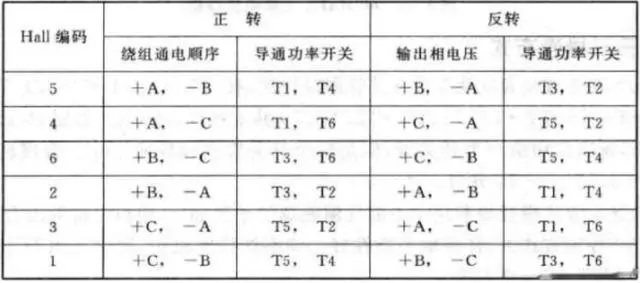
如下为一种电机的霍尔输出与反电动势输出示意,可知在电机霍尔A输出由1变为0时,控制U+开通。
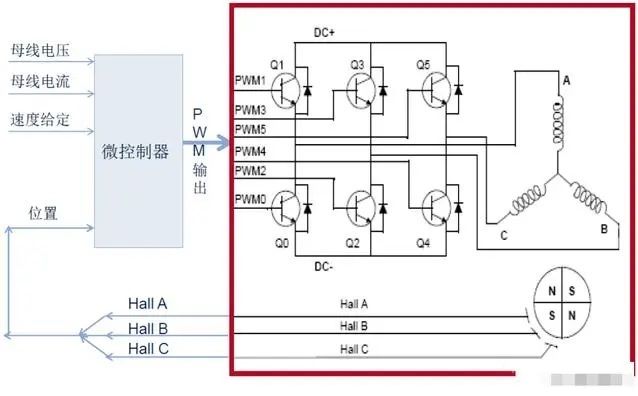
BLDC有感控制系统如下:
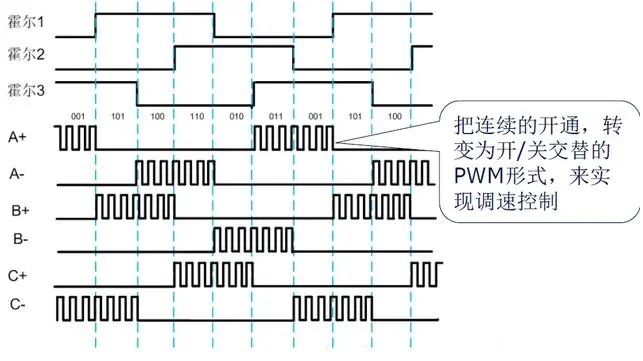
BLDC速度控制:
在BLDC电子换相的基础上,通过更改导通时PWM占空比即可改变等效的输出电压, 从而更改来实现调速。
BLDC无感控制
BLDC使用霍尔传感器时,存在以下问题:HALL的安装条件受到限制、Hall影响系统可靠性(Hall易损坏,需要检修)、Hall对安装精度有要求、有一定成本。因此有必要研究BLDC的无感控制方法。
BLDC 无传感器控制的主要任务就是对转子位置进行估计。两种基本技术如下:
基于反电动势感应的技术:基于反电动势过零来进行换相;要求反电动势足够高,速度范围在额定转速的5-10%至100%。
基于电机电感凸极的技术:基于瞬态电流测量;速度范围为静止至标称速度的约20%。
常用的是基于反电动势过零检测的方法,但这要求电机有一定速度;有时候会结合使用,但需要使用复杂的控制算法。下面主要对基于反电动势感应的技术进行介绍。
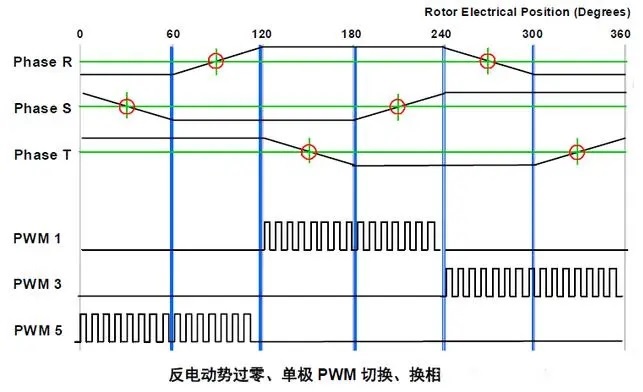
正确换相的电机相绕组电压波形与反电动势波形如图所示。从图中可得到正确的换相点应在过零点延迟30°。因此,反电动势过零信号可以用作估计正确换相时间点的计算依据。





 发送邮件
发送邮件 商务QQ客服
商务QQ客服 13823761625
13823761625